
I’ve been getting quite interested in building robots lately. The reason is that I strongly believe in the embodiment of AGI systems in order for them to make sense as perception-action and learning agents.
To further my machine-learning algorithm embodiment goals, I recently acquired a MakerBot Relicator 2 Desktop 3D printing system. Here is a picture of the system with some 3D parts I’ve printed:

I’ll talk more about the system specifically and what I’ve discovered through using it in a later post.
I decided to start with some robot builds, specifically this one:
InMoov 3D printed robot
Here is the blog of the robot designer, hairygael:
InMoov Blog
All credit goes to him for the beautiful design of these pieces!
I think I first saw this robot reported on a tech news site and thought it looked awesome. I’ve since been printing and assembling some of the components. I started with the hand. Here are a few pics!

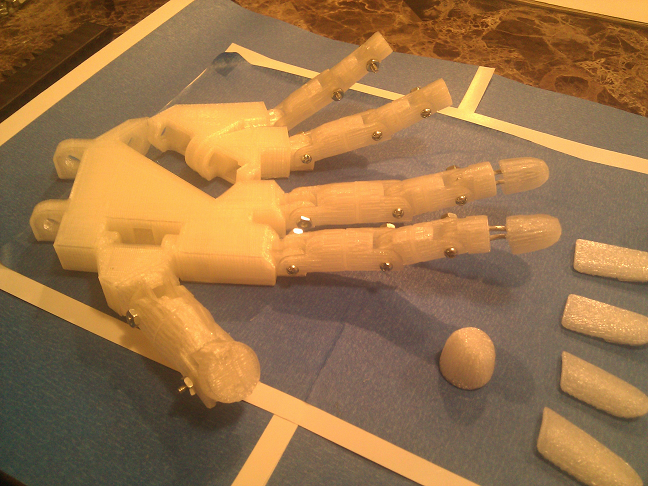



The entire hand is printed using PLA – interestingly not the material that the designer used to build the original robot (ABS, the “other” 3D printer material was used in the build documented on the blog link above).
The hand works using an animatronic-inspired “tendon” method, where strings run the length of the fingers. Tension can be applied to each string to either curl or uncurl the corresponding finger. Here is a picture of some of the tendons threaded through the robot hand:

I also tried to make a smaller hand, printed at 50% of the scale. There are a lot of difficulties in this process, including the fact that the servos I bought were not exactly 50% of the scale. Here is the result so far:

I’ll have to experiment with printing the hand at different sizes to see if my smaller servos can be made to fit. I’m a little worried that even if I get the hand servos to work, there will be some problem later on with the servos for the shoulder, head etc. Anyway, it is all a learning process!
I think it is super-cool that people can print their own robots at home now. We definitely need many more designs submitted to Thingiverse (one of several 3D printing open-source design warehouse) for robots of all kinds. The more robots exist, the easier it will be to develop, test and improve machine learning algorithms for their brains.

Reblogged this on STEM – ROBOTICS EDUCATION.
Where on earth did you manage to pick up a 3d printer? 😉 Not been keeping up with your blogs here and on D-Wave but just seen all your ideas about AI and needing the complexity of interaction with the real world – and it reminded me of my PhD years 🙂 Good luck!
Hi Rob!
Long time no speak! Yes you were my original inspiration to go down this route! 😉
I’d love to hear more – about your robotics/AI ideas and how things are going in general 🙂 I guess you don’t pick up your far-blue email these days so maybe drop me a line?